株式会社 中村組 市川 晃
1.はじめに
本工事は、市道東三方都田線(N6・C 交通)にて老朽化による、亀甲状クラック、線状クラック、わだち掘れが多く発生しているための舗装修繕工事であった。
QRP 工法(急速舗装修繕工法)を施工するにあたり、品質向上のために建設 ICT の一環である「自動追尾型トータルステーションによるローラーの軌跡・温度管理」を採用することにした。
2.工事概要
- 工事名
- 平成 25 年度 道整備交付金事業(市) 東三方都田線舗装修繕工事(第 2 工区)
- 工事箇所
- 浜松市北区大原町 地内
- 工期
- 平成 26 年 3 月 19 日~平成 26 年 8 月 25 日
- 発注者
- 浜松市役所 土木部 北土木整備事務所
- 工事内容
- 施工延長 L=400m
施工面積A=6770m2

3.建設ICT 概要と採用技術について
近年の社会状況を見ると、財政制約や生産年齢人口の減少、環境への意識の高まり等を背景に、品質、コスト、安全、環境を含めたさらなる建設生産の合理化が求められる中で、急速な技術革新が進んでいるコンピューター・ 通信技術を調査・設計・施工・維持管理・修繕の一連の建設生産システムに導入し 生産性向上を目的とした通信技術のことである。
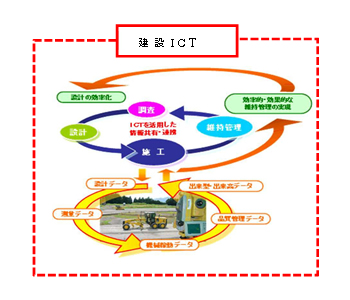
今回採用した、自動追尾型トータルステーションによるローラの軌跡・温度管理は、自動追尾型のトータルステーションによりマカダムローラ・タイヤローラに設置したターゲットを常時測定し測定記録を随時ローラに設置したモニターにデータを送信します。ローラのオペレーターが場所毎の転圧回数を色で確認することができ、転圧不足箇所を無くし舗装全体の品質向上が期待できる。
4.自動追尾型トータルステーション管理の仕組みと管理方法
事前に、ターゲットからローラ設置点下図-3の①~④の離れをX-Y で測定しておき、管理ソフトに入力、これによりターゲットの位置1点を管理することにより、①と③・②と④の線上通過箇所を色塗することにより平面図上で転圧回数を管理することができる。
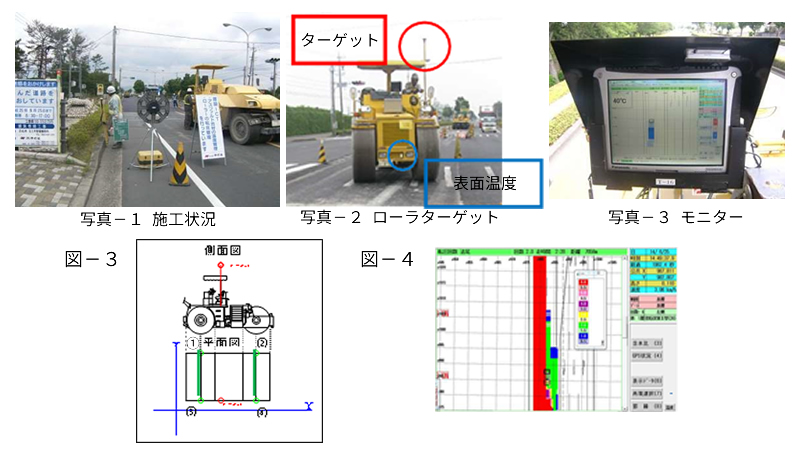
次に、転圧回数を試験施工により決定する。
今回は前輪3往復・後輪3往復の3回転圧で管理をすることにした。
図-4で赤く塗れている箇所は所定の回数転圧できており、それ以外の色は、色によって あと残りの転圧回数がわかるようになっている。例えば緑色の箇所は前輪後輪併せて2回転圧されているため、あと2往復転圧が必要である。この情報がリアルタイムでローラの運転席のモニターに映し出され、そのデータを元に、ローラのオペレータは転圧不足箇所がないよう転圧することができる。
温度管理も同じくマカダムローラに取り付けた表面温度計により合材敷均し温度を抽出的ではなく、舗装施工範囲全体の管理が可能となる。
しかしここで、表面温度計は実際敷き均した合材に接触していないため実際の敷均し温度との差異が生じたため、電子温度計で測定した温度と表面温度系で測定した温度の差の平均を測定しその差を補正値として合材の温度管理を行うことにした。
5.結果
今回自動追尾型トータルステーションによるローラーの軌跡・温度管理を採用して、表層工で密度平均98.3%中間層工で99.2% 基層工(QRP工)で密度平均99.5%と良好な品質を確保することができた。
6.おわりに
今回自動追尾型トータルステーションによるローラーの軌跡・温度管理を使用してみて 舗装の品質管理について、抜粋のコア採取と併せることにより、部分的の品質の証明だけでなく施工箇所全体の品質証明を発注者の方にわかりやすく説明し理解をえることができた。
今後、作業員不足・施工の熟練者不足が懸念される建設業界において建設ICT は大きな成果をあげていく物だと感じた。しかし、作業のすべてが機械化・機械管理化されるというのは少し寂しい印象も抱いた。
